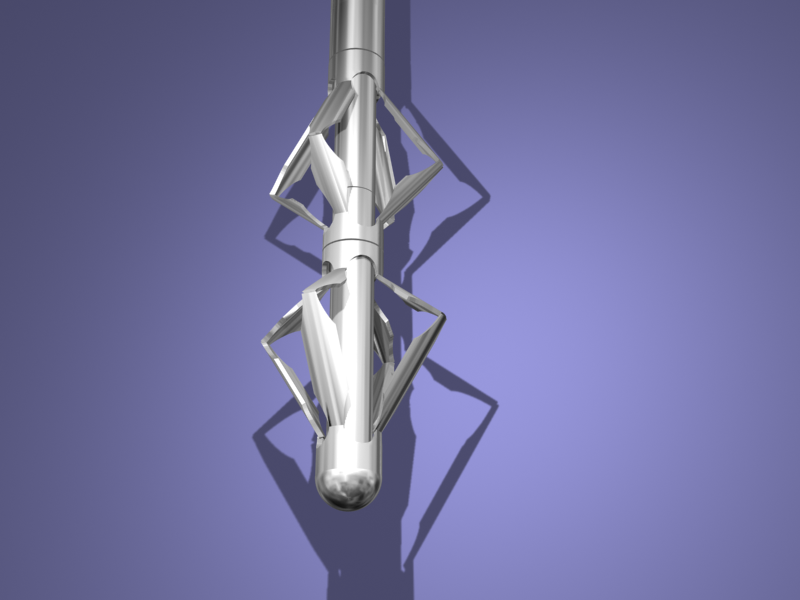
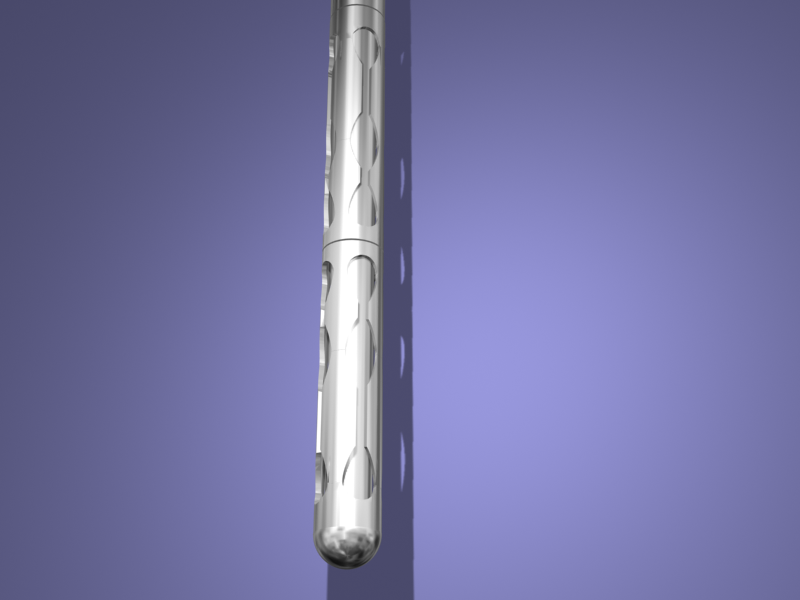
the development of this engineering approval visualization was focused on high-level approximation of the micro-medical device
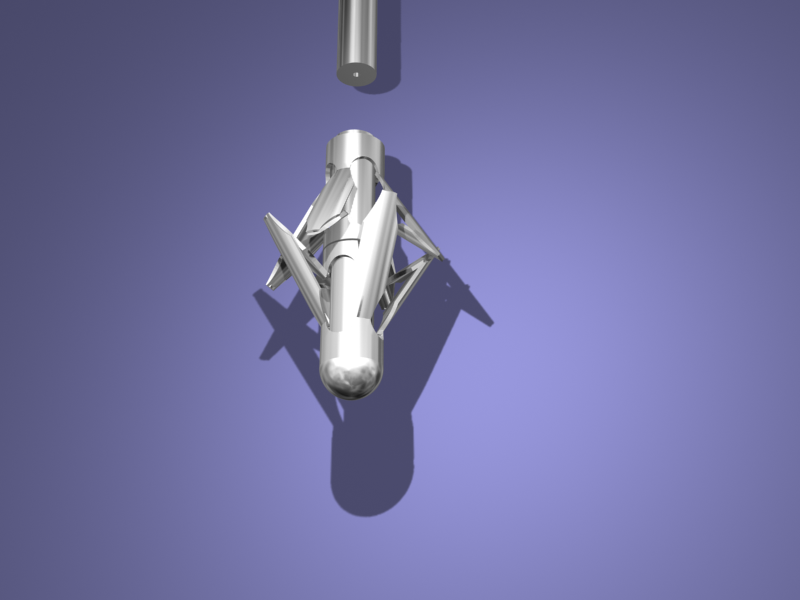
inverse-kinetics and joint rigging visualization techniques were used to accurately represent the expected device mechanics
while dynamic design solutions is no longer bound by the non-disclosure agreement associated with the invectus fsd, i choose out of respect to not provide details impertinent to this portfolio
inverse-kinetics and joint rigging visualization techniques were used to accurately represent the expected device mechanics
while dynamic design solutions is no longer bound by the non-disclosure agreement associated with the invectus fsd, i choose out of respect to not provide details impertinent to this portfolio
[ solidworks + 3ds max ]
|
|